

摘要:本文主要介绍了机器人的驱动与控制,通过具体的应用实例来阐述机器人技术的实际应用情况。文章首先概述了机器人的驱动方式,包括电力驱动、液压驱动和气动驱动等。介绍了机器人的控制方式,包括传统控制和智能控制。通过实际案例展示了机器人在不同领域的应用,包括工业制造、医疗、农业等。本文旨在让读者了解机器人技术的基本原理、控制方法和应用实例,以便更好地应用机器人技术解决实际问题。
本文目录导读:
随着科技的飞速发展,机器人技术已成为现代工程领域的重要组成部分,机器人驱动与控制是机器人技术的核心,决定了机器人的运动性能和功能实现,本文将详细介绍机器人驱动与控制的基本原理,并结合实际应用案例,展示机器人在不同领域的应用情况。
机器人驱动原理及控制方式
1、机器人驱动原理
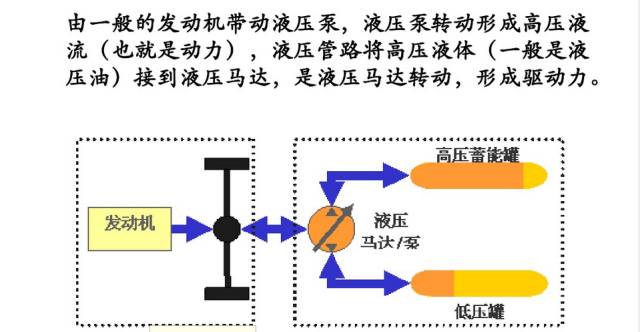
机器人驱动是通过电机、液压或气压等动力源,驱动机器人的关节、轮子、臂等部位运动,电机驱动是目前最常用的方式,包括直流电机、交流伺服电机等,液压和气压驱动主要用于工业机器人中的大力矩、高精度场景。
2、机器人控制方式
机器人控制方式主要有三种:手动控制、半自动控制和全自动控制,手动控制主要用于调试和初态设置;半自动控制通过预设程序实现机器人的运动;全自动控制则通过传感器、视觉系统等实现机器人的智能导航和避障。
机器人应用实例
1、工业机器人
工业机器人是机器人应用最广泛的领域之一,以焊接机器人为例,通过精确的电机控制,实现焊接过程的自动化和高效化,借助视觉系统,焊接机器人可以自动识别焊点位置,实现精准焊接,装配机器人、搬运机器人等也在工业生产中发挥着重要作用。
2、服务机器人
服务机器人在餐饮、医疗、教育等领域有广泛应用,餐饮领域的自动送餐机器人,通过精确的导航系统和语音识别技术,实现自动送餐、回收餐具等功能,医疗领域的护理机器人,可以协助医护人员完成病人的日常护理和照料工作。
3、特种机器人
特种机器人在军事、救援、勘探等领域有重要应用,无人作战机器人可以在战场上执行侦查、攻击等任务,有效减少人员伤亡,救援机器人在地震、火灾等灾害现场,可以执行搜索、救援、运输等任务,勘探机器人可以在极端环境下进行矿产、地质勘探。
实际应用案例详解
以某汽车厂的焊接机器人为例,该机器人采用高精度电机驱动,通过视觉系统识别焊点位置,实现精准焊接,在控制方面,采用全自动控制方式,通过预设程序实现自动化生产,该焊接机器人的应用,大大提高了汽车生产的效率和品质,降低了人工成本和安全风险。
机器人驱动与控制是机器人技术的核心,决定了机器人的运动性能和功能实现,本文详细介绍了机器人驱动与控制的基本原理和方式,并结合实际应用案例,展示了机器人在不同领域的应用情况,随着科技的进步和需求的增长,机器人将在更多领域得到广泛应用,为人们的生活和工作带来更多便利和效益,我们需要不断深入研究机器人驱动与控制技术,推动机器人的智能化、高效化和安全化发展。
 京公网安备11000000000001号
京公网安备11000000000001号 京ICP备11000001号
京ICP备11000001号
还没有评论,来说两句吧...